Enhancing Real-Time Maritime Object Tracking with Satellite-Based Edge AI and Deep Reinforcement Learning
Date: March 21, 2025
Tags: international-research
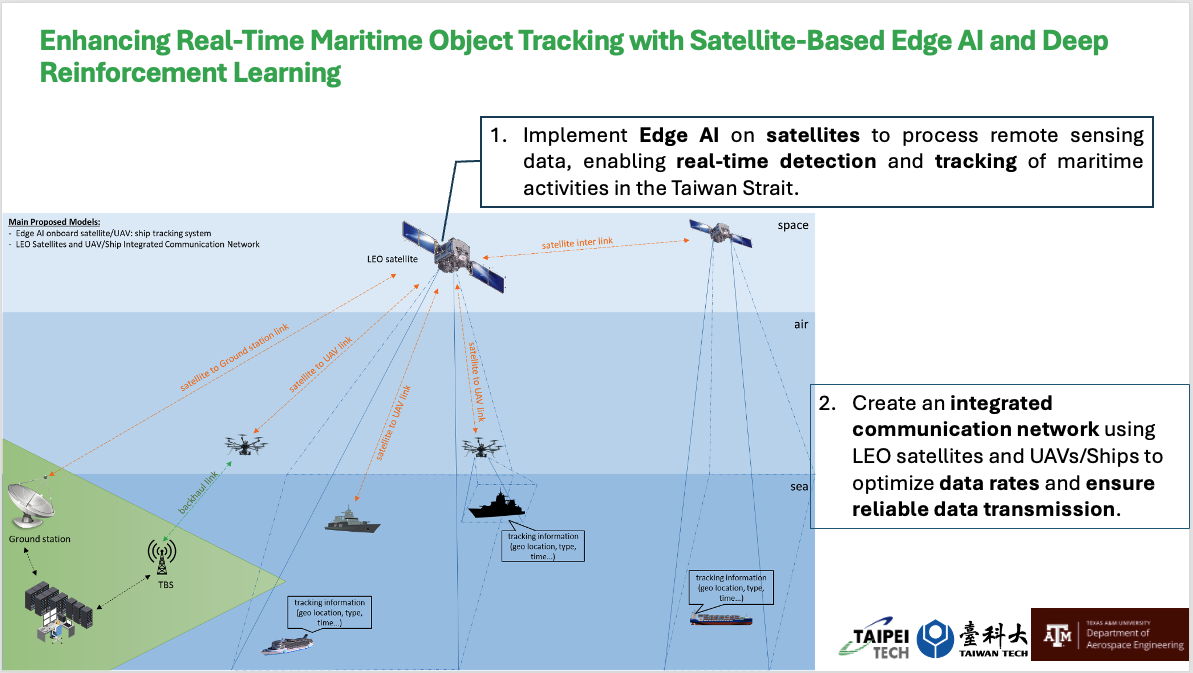
1. Implement Edge AI on satellites to process remote sensing data, enabling real-time detection and tracking of maritime activities in the Taiwan Strait. 2. Create an integrated communication network using LEO satellites and UAVs/Ships to optimize data rates and ensure reliable data transmission.
📌 Introduction
This project is supported by the Ministry of Education, Taiwan, under the 2024 University Academic Alliance in Taiwan (UAAT) – The Texas A&M University System (TAMUS) Integrated Program: Interdisciplinary Capacity Building for the New Space Generation. It represents a collaborative initiative between Taipei Tech (Taiwan Tech) and Texas A&M University to strengthen academic and technological capabilities in aerospace and remote sensing through real-world research applications.
This project focuses on real-time maritime object tracking using Edge AI and Deep Reinforcement Learning. While the overarching vision involves satellite-based processing, the current development and testing are centered on UAV platforms. Specifically, the project involves:
- Processing remote sensing data with AI models on UAVs to simulate future satellite integration.
- Tracking maritime activities in the Taiwan Strait using onboard Edge AI for real-time ship detection and classification.
- Developing and testing a UAV-based communication network to validate architecture and data transmission strategies planned for eventual LEO satellite deployment.
🛠️ Note: Satellite systems are not included in the testing phase or KPIs of the current project cycle. UAVs serve as a testbed for core AI and communication technologies that will later scale to satellite applications.
📝 Midterm Report (as of May 2025)
1. Project Overview
This collaborative research project aims to enhance maritime object tracking using Edge AI and deep reinforcement learning technologies. Although the long-term vision includes satellite-based AI processing, the current phase is focused exclusively on UAV-based implementation and validation.
2. Objectives
- Implement Edge AI on UAV platforms to enable real-time processing of remote sensing data for ship detection and tracking.
- Develop a UAV-based communication network to ensure efficient and reliable data transmission between UAVs and ground stations.
- Lay the groundwork for eventual integration with satellite systems through UAV-based testing of algorithms, models, and network behavior.
3. Scope Clarification
While the project title references satellite-based tracking, all development, integration, and validation during this project period are performed using UAV platforms only. Satellites are not involved in hardware or system testing in this phase.
4. Progress Highlights
- ✅ Edge AI Deployment on UAVs: Onboard object detection models (e.g., YOLOv5, MobileNet) successfully integrated on embedded GPU platforms.
- ✅ Scenario Modeling: Simulated maritime activity and environmental data over the Taiwan Strait used to train AI models.
- 🔄 UAV Communication Prototyping: UAV-to-UAV and UAV-to-ground communication protocols prototyped and tested under various network topologies.
- 🔄 Reinforcement Learning Development: Initial RL policies under training to manage UAV routing and communication optimization.
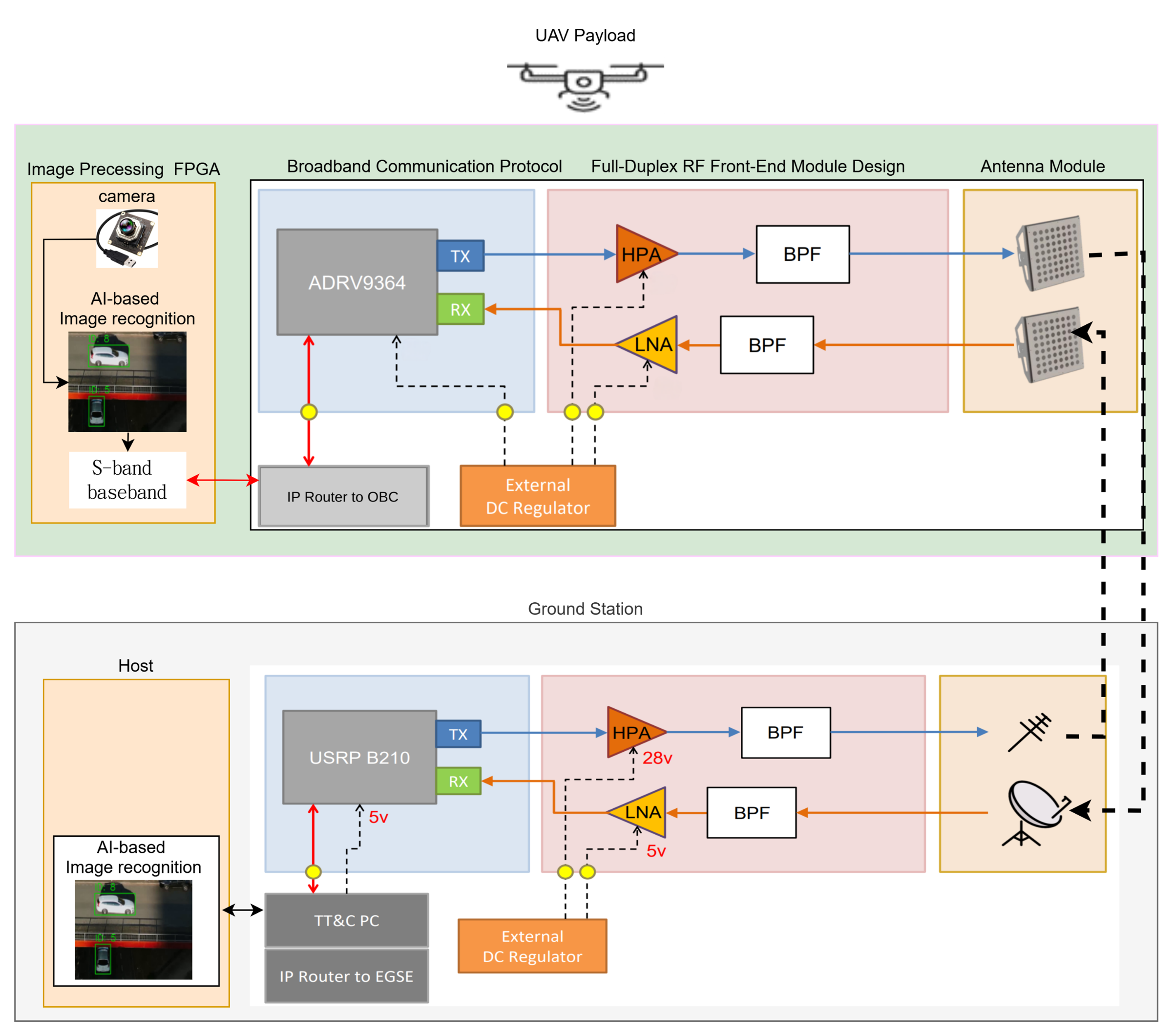
5. System Integration Diagram
The following diagram shows the integrated architecture for the UAV and ground station systems, including AI-based image recognition, RF front-end design, and broadband communication via the S-band:
5.1 UAV Platform Setup
This image shows the hardware setup of the UAV, integrating the FPGA module, camera, and S-band communication payload:
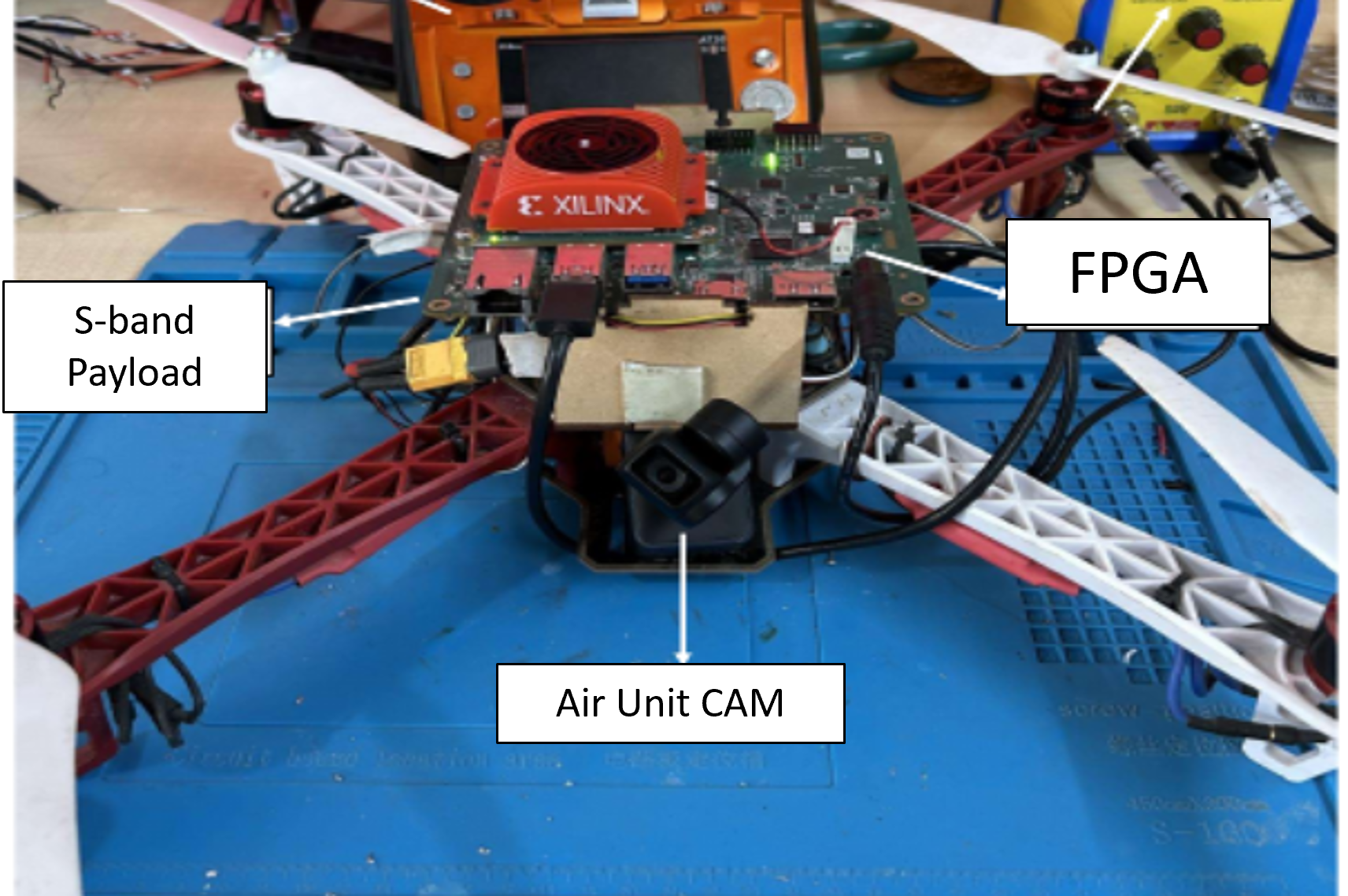
Key Components:
- FPGA (Xilinx) for onboard AI inference
- Air Unit Camera for visual input
- S-band Payload for real-time transmission
5.2 Tracking Performance Comparison
To evaluate object tracking robustness, a comparative analysis was conducted between the baseline YOLO tracker and the proposed architecture. The sequence below shows object ID consistency across frames under occlusion conditions.
Tracking by YOLO:
![]()
Tracking by Proposed Model:
![]()
The results demonstrate that the proposed system improves tracking consistency by:
- Reducing ID switches
- Improving occlusion handling
The object retains a consistent ID even through temporary visual occlusion, showing the benefit of integrating motion prediction into the model.
5.3 Real-Time Tracking Demo (GIF)
The following animation demonstrates performance gains of the proposed tracking system compared to YOLO:
![]()
📌 The GIF highlights smoother tracking transitions and better ID retention through occlusion, critical for UAV-based missions.
6. Next Steps
- Conduct multi-UAV flight tests to validate full AI + communication system pipeline.
- Optimize model efficiency for edge hardware (compute, power, bandwidth).
- Expand and evaluate reinforcement learning performance under more complex environmental dynamics.
7. Summary
Although satellites are a long-term integration target, this project cycle uses UAVs as a practical test platform to build, test, and refine AI and communication technologies needed for real-time maritime monitoring in the Taiwan Strait. The outcomes will directly support scalable transition to LEO satellite-based systems in future phases.
8. Research Output
As part of this UAAT–TAMUS project, the following peer-reviewed publication has been submitted and accepted for presentation:
Ho, T., Bui, T.-A., Lee, P.-J., Lin, H.-P., Selva, D., Le, T.-T., & Tran, H.
“Mitigating Occlusion and Re-Identification Challenges in UAV Object Tracking”
Proceedings of the 2025 IEEE International Conference on Consumer Electronics – Taiwan (ICCE-Taiwan), Kaohsiung, Taiwan, July 15, 2025.
📝 This paper addresses key challenges in UAV-based object tracking, including occlusion handling and identity preservation. It reflects foundational work developed under the scope of this project.